Setting up the Vertiq 23-06 for the UPF-23-12¶
For the UPF-23-12 to create control torque, the Vertiq 23-06 must have the appropriate firmware and settings applied. You can download the pulsing firmware for the Vertiq 23-06 on the underactuated propeller page. To flash the downloaded firmware use the instructions in Updating Firmware with the Control Center.
Once the firmware is flashed, connect the module to IQ Control Center and go to the ‘General’ tab.
Warning
With firmwares older than V0.0.27 defaults for the UPF-23-12 were not included in the firmware and custom defaults needed to be flashed. To do this download the UPF-23-12 Custom Defaults File. Use the ‘Import’ button to load the defaults file into IQ Control Center.
Use the ‘Set’ button to save the settings from the defaults file onto the Vertiq 23-06. This will set all the required settings as well as change the Vertiq 23-06’s baud rate. Reboot the Vertiq 23-06. Once rebooted, to reconnect to IQ Control Center you must set the baud rate to 921600.
We also recommend using a baudrate of 921600 to increase the throughput of the serial line. This can be done by going to the ‘Advanced’ tab in IQ Control Center and changing the baudrate setting.
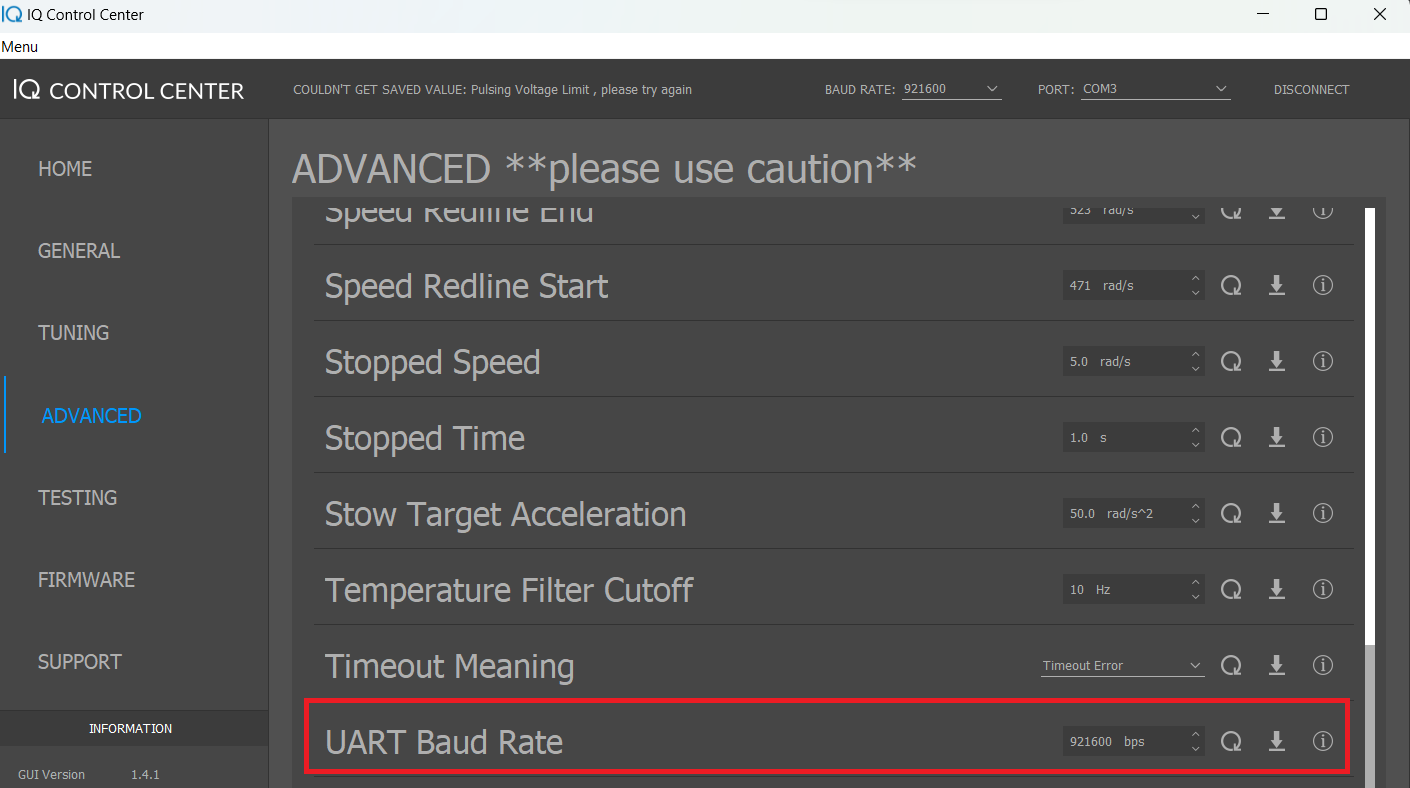
Setting Buad Rate¶
Once the baud rate is changed in the module settings the module must be rebooted. Once rebooted, to reconnect to IQ Control Center you must set the baud rate to 921600.
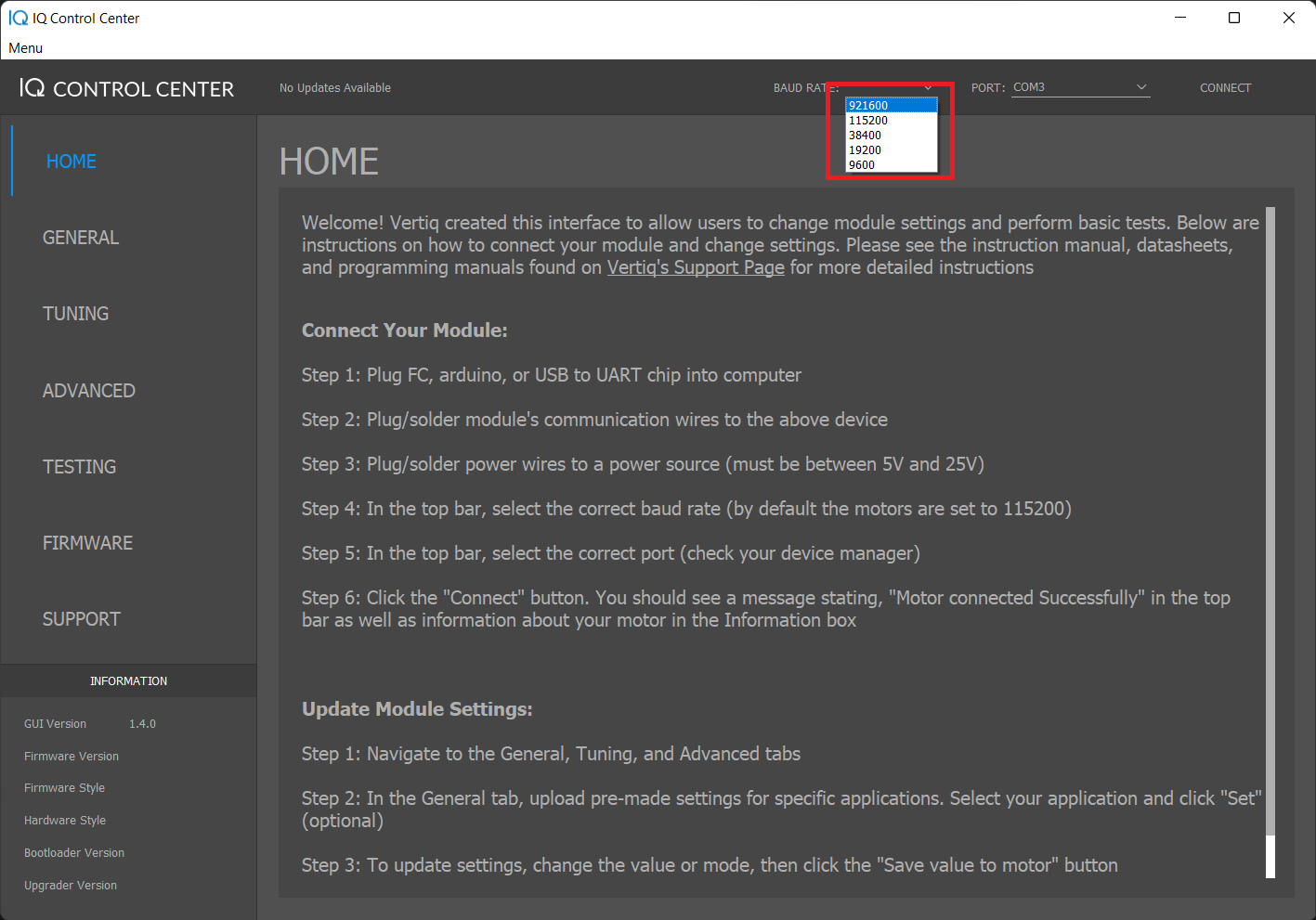
Setting Control Center Baud Rate¶
Now the forward direction of the Vertiq 23-06 must be decided. Usually this is done by mounting the Vertiq 23-06 to the aircraft with the adapter and main shoulder bolt mounted to the Vertiq 23-06. After mounting your Vertiq 23-06 to your aircraft, choose the direction you want to treat as forward and rotate the shoulder bolt to that angle.

Setting Aircraft Forward¶
Connect the Vertiq 23-06 to IQ Control Center (using 921600 as baud rate). Go to the ‘General’ tab, and while the bolt is angled forwards select ‘Sample Pulsing Zero Angle’. This will tell the Vertiq 23-06 which direction is forward.
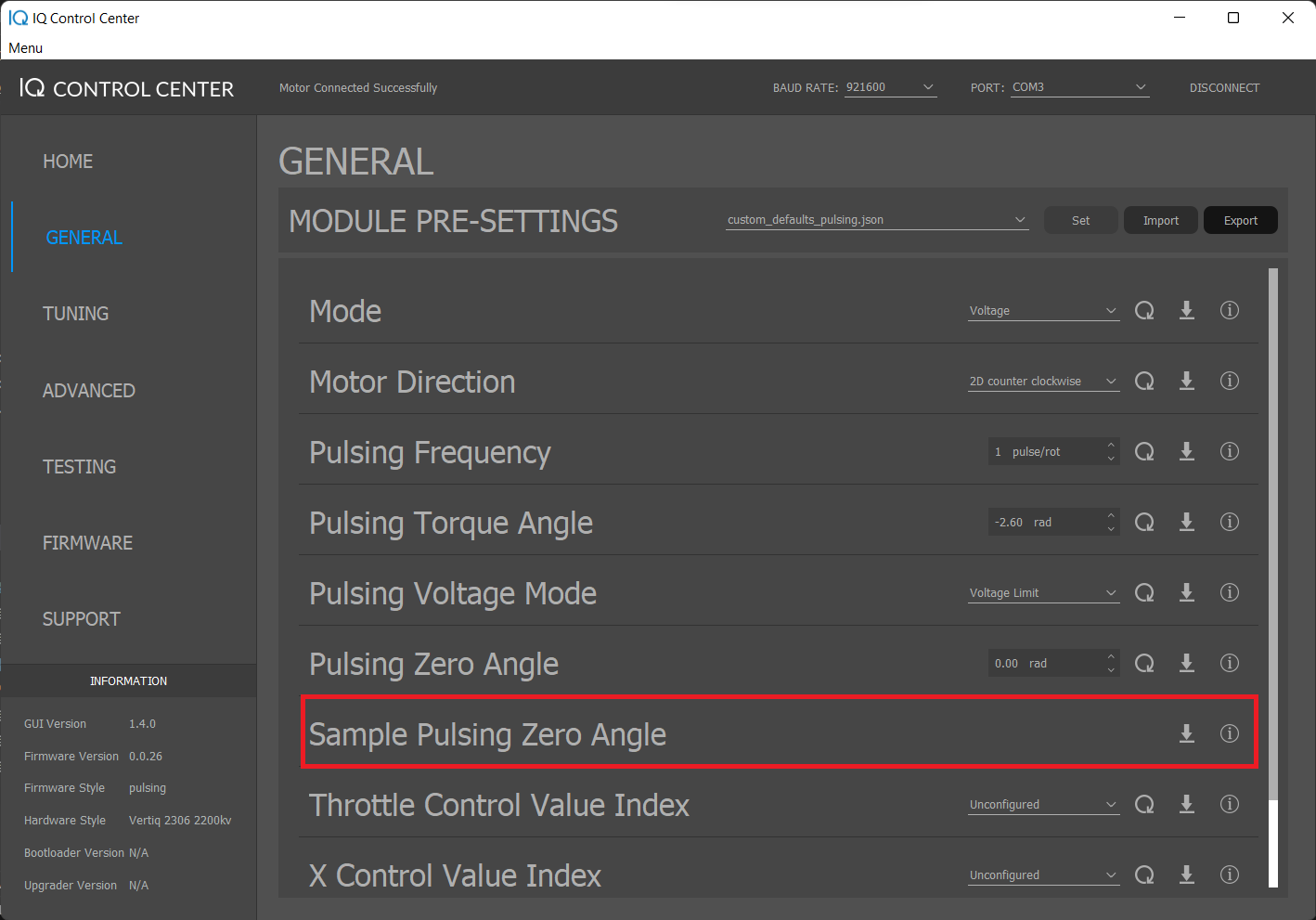
Sampling Zero Angle¶
The module will now respond properly to X, Y and Throttle commands sent to it via packed control messages as explained in IQUART Flight Controller Interface. The final step is to correct the propeller torque angle as described in Underactuated Propeller Torque Angle Correction.